PLM / PDMって何ができるの?
基本機能を20本の動画で紹介.
シーズン1
BOM作成奮闘記 ~蝸牛型巨神兵ノ建造始マル~
新章
2026年 新シーズン5月start
プラモデルのBOM作成にコネクテッド社・総務メンバーが挑み奮闘する記録譚がはじまる。
【第1話】会社に突然届いた依頼の手紙と謎の箱。

BOM作成奮闘記【第1話】
蝸牛型巨神兵ノ建造始マル

BOM作成奮闘記【第2話】
パーツ紹介
シーズン0
退屈な大地編
各エリアに存在する動画タイトルと再生する旅人への警告
※それってPDMでは普通なのとショックを受ける可能性があります。
最初島
最初島
- BOMエディター起動
- 部品を選択して順展開すればBOMが起動、図面管理と部品表の連動がすばらしい。
- 逆展開BOM
- ある部品の影響範囲の可視化。影響範囲を見ずに旅はできないです。
- 製品構成ツリー
- ツリーの展開・折りたたみは+/-クリック。展開と折りたたみは簡単に限る。
- 流用機能
- 標準部品の利用促進。つまり、経営層の好む、コスト削減できます。
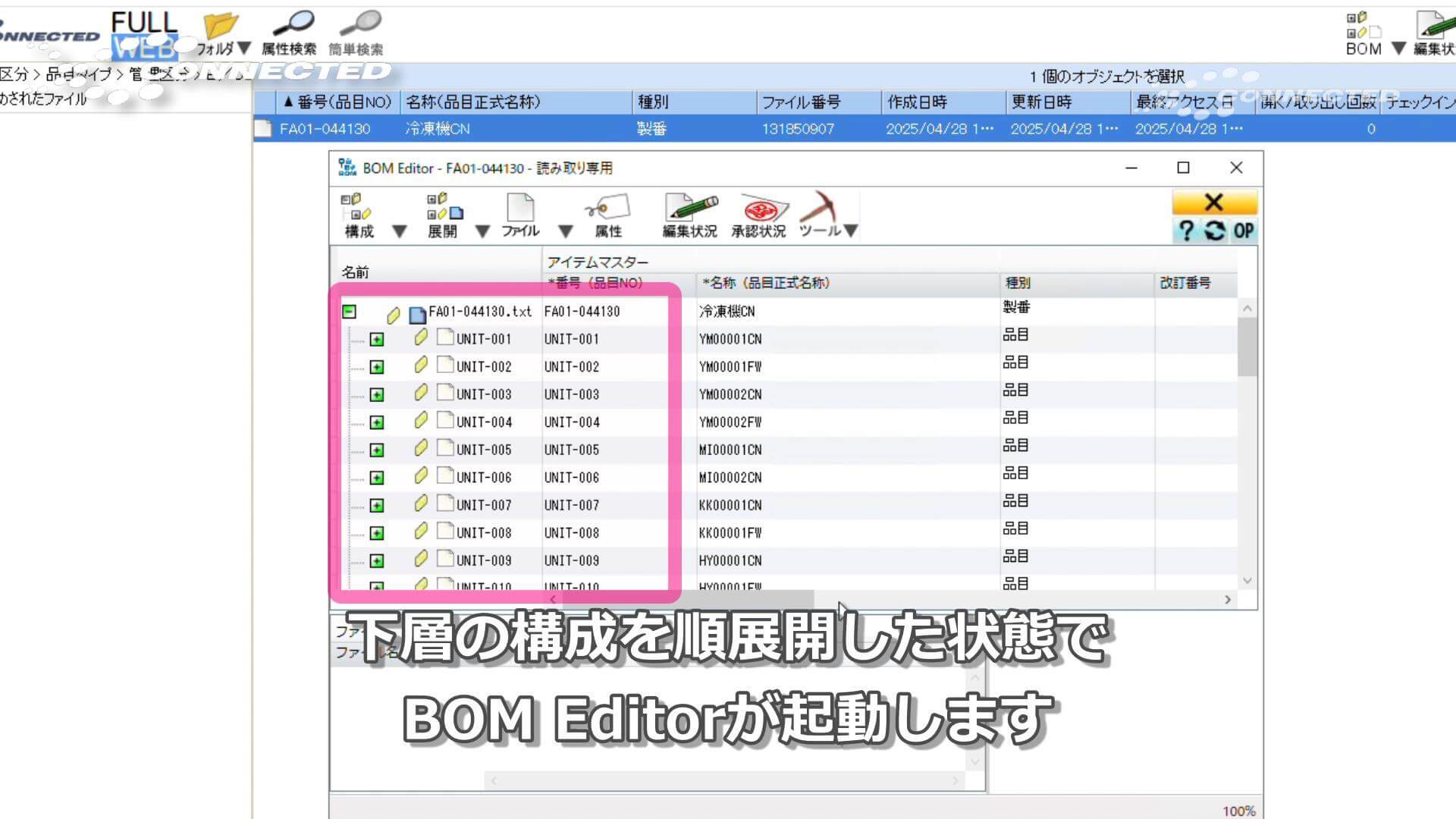
BOM Editor起動
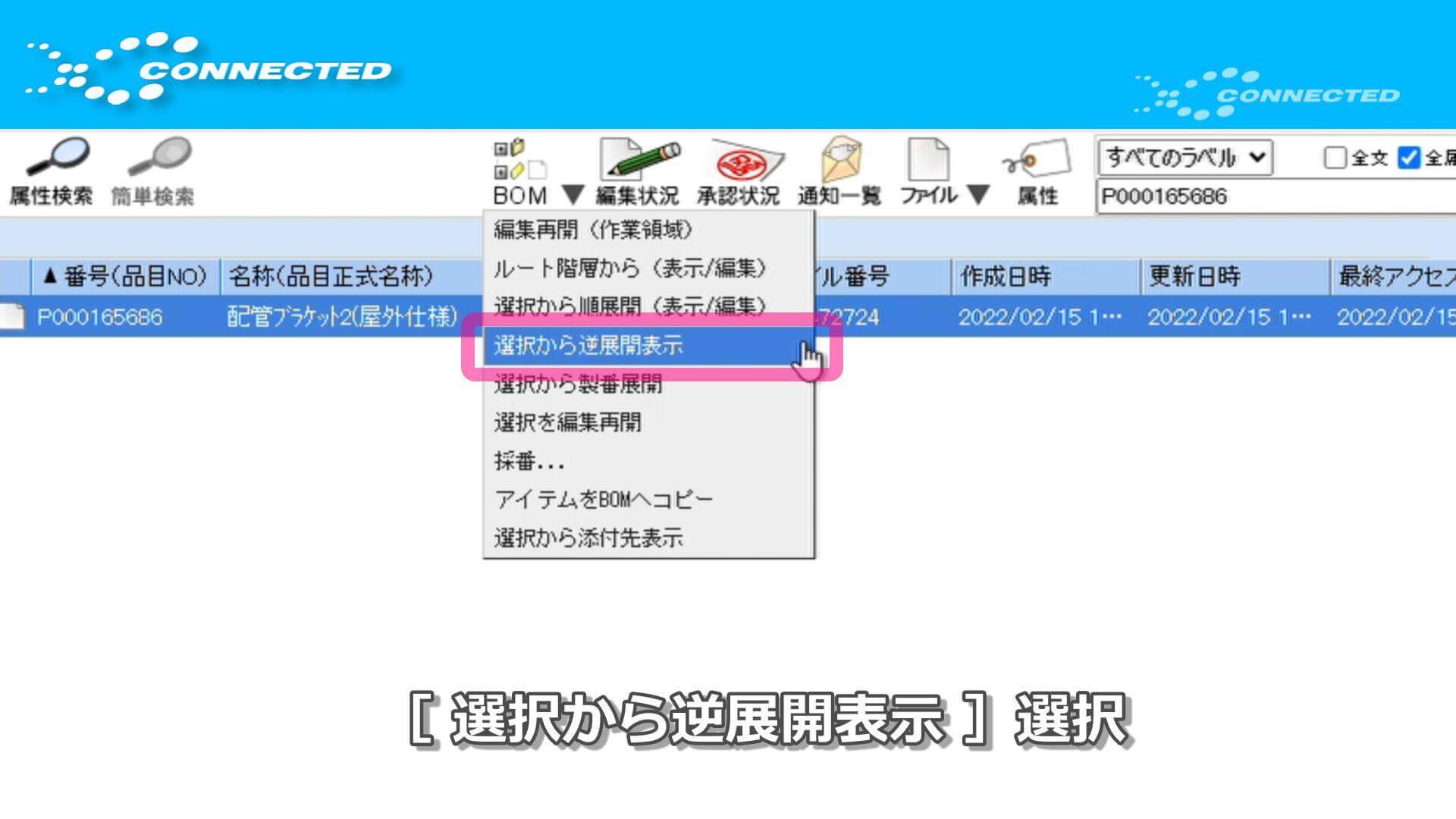
逆展開BOM
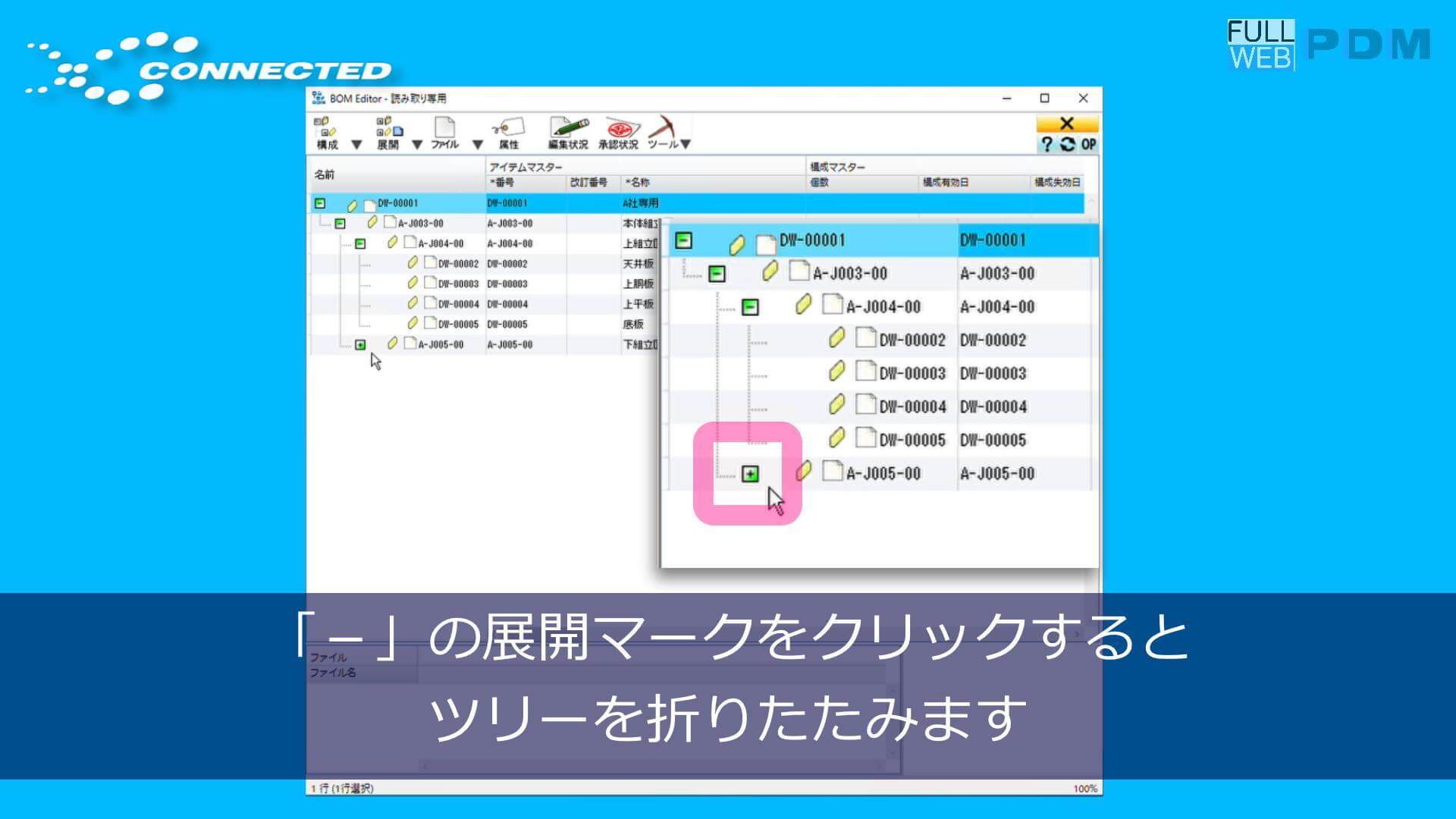
製品構成ツリー
既存部品の流用機能
採番大陸
採番大陸
- 採番ルール作成
- 採番ルールは、いつでも、いくつでも好きなだけ作れます。
- 採番機能
- 一気に連番確保したい。(なんか、昔流だけど)
- 採番ルール桁数を増やす
- 運用途中で番号が枯渇した。(よく、考えてなかったん?)
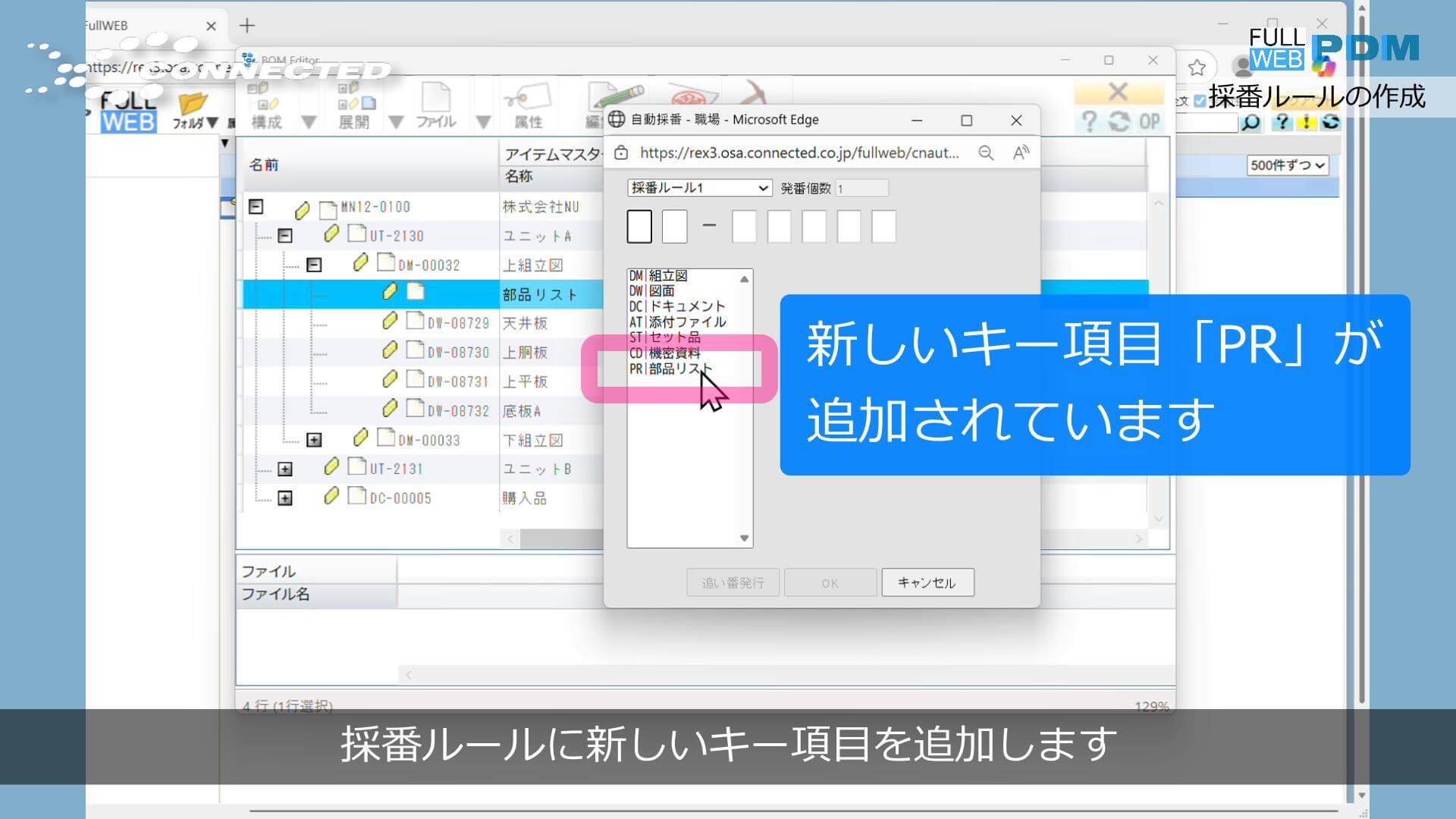
採番ルールの作成
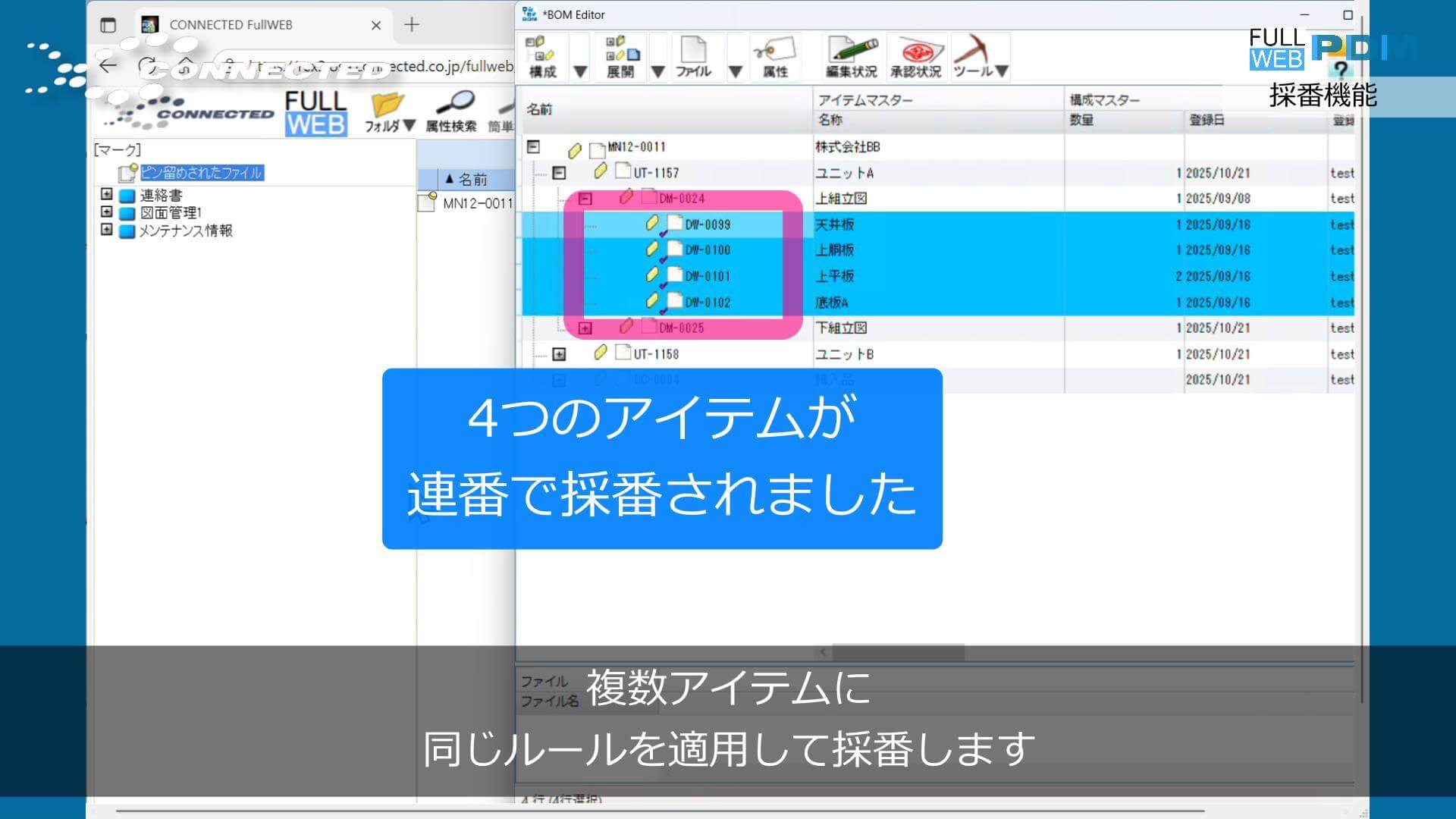
採番機能
採番ルール|桁数を増やす
複数BOM大陸
複数BOM大陸
- 複数BOM同時表示
- 複数参照BOMをみながら新規設計できる。10個ぐらいBOM見てる人、普通にいます。
- BOM画面をまたぐコピー
- ふたつのBOMを表示すると、コピー簡単。
- 複数のBOM画面から
- あっちから・こっちからコピーできる。流用設計で、そう、コスト削減。
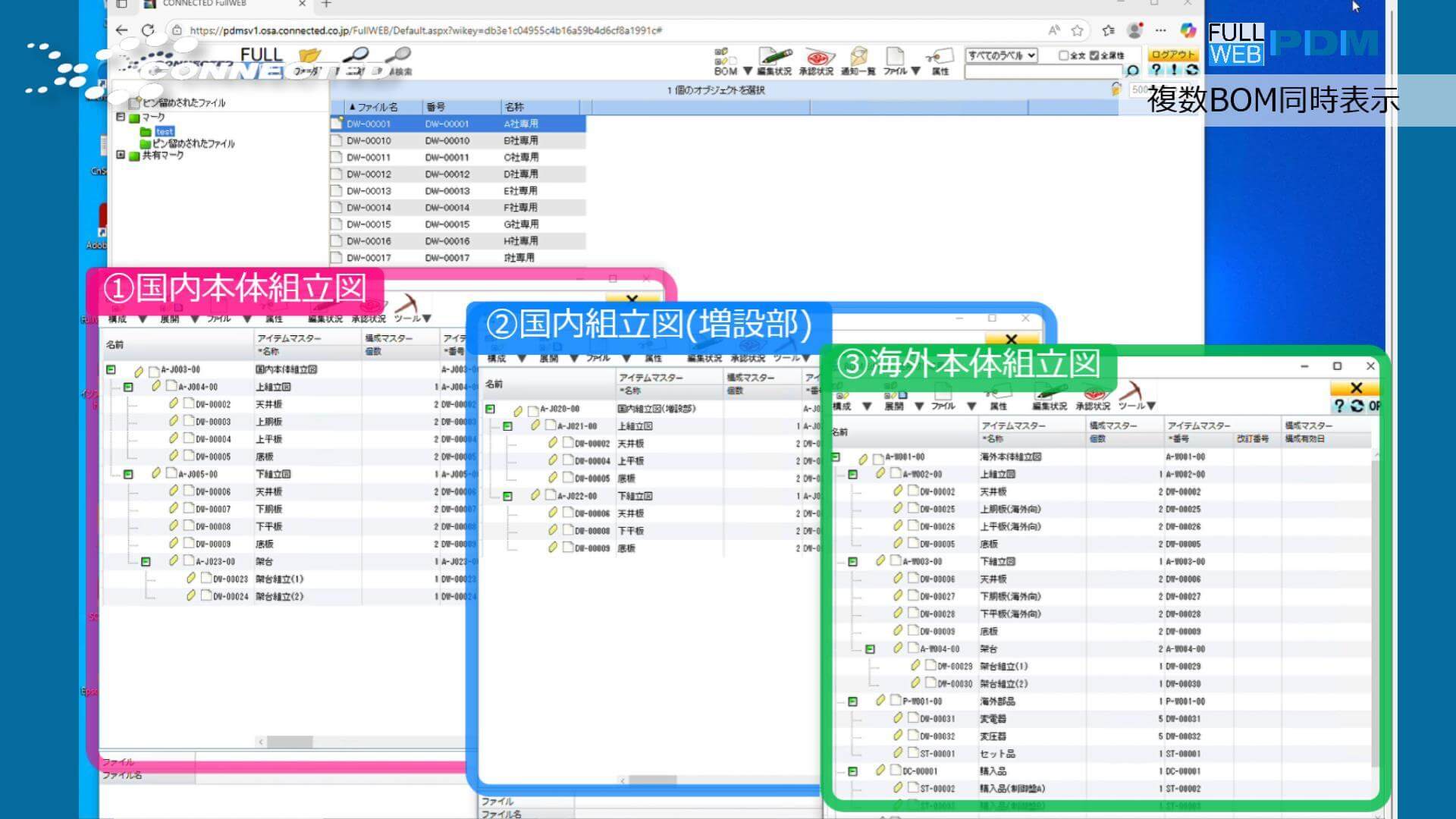
複数BOM同時表示
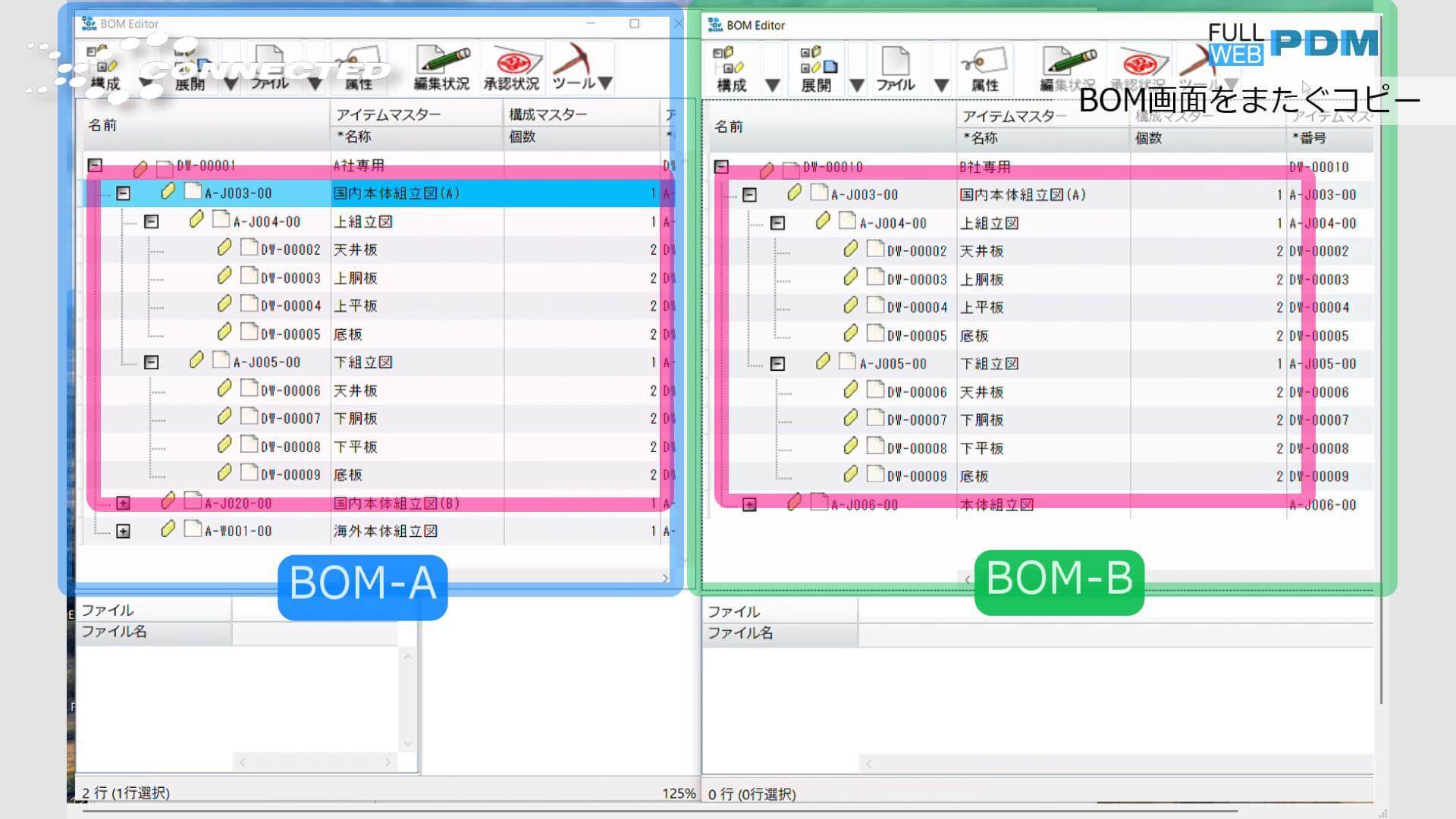
BOM画面をまたぐコピー
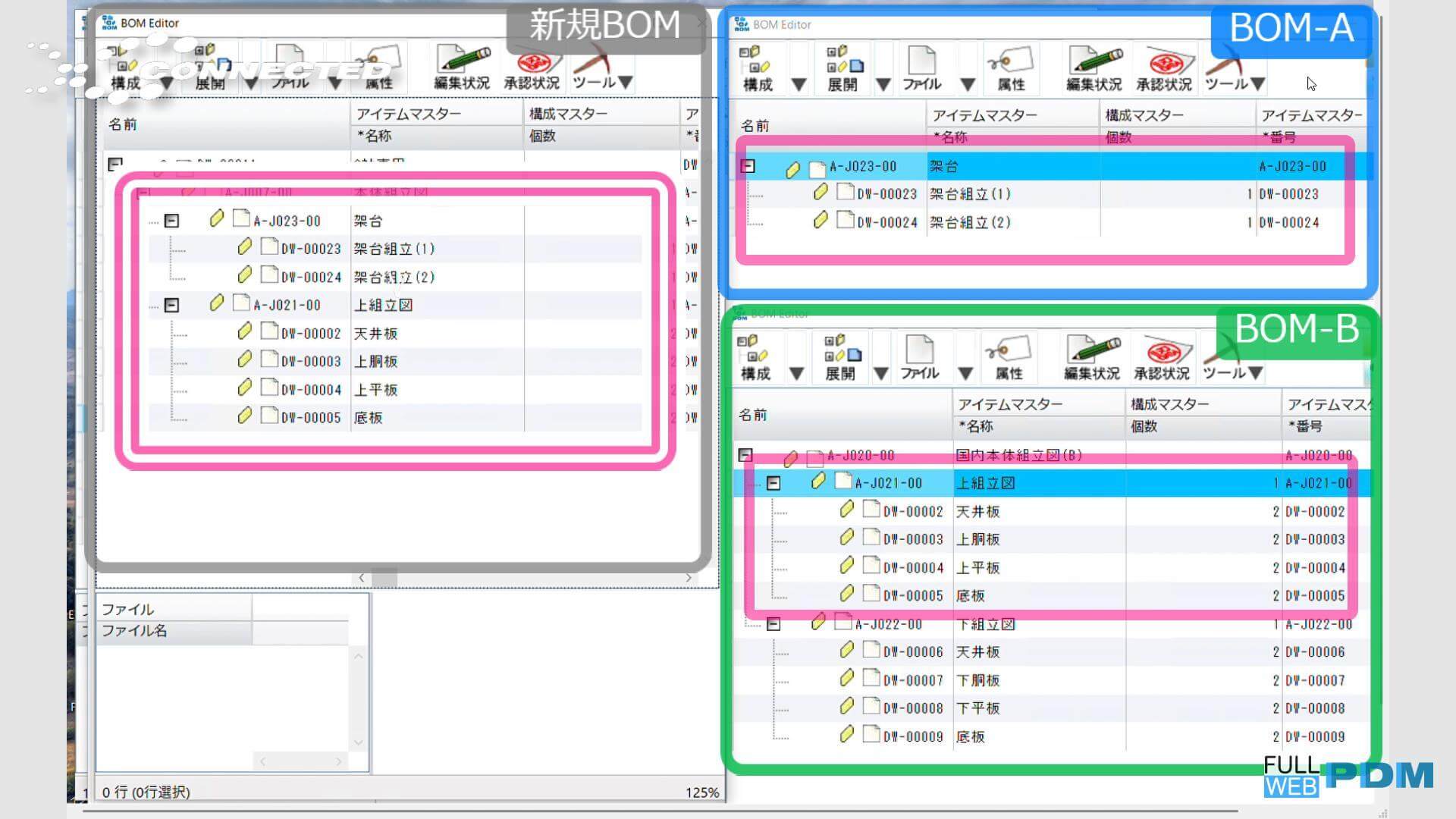
複数BOM画面からのコピー
重要大陸
重要大陸
- 承認押印
- だいたい、BOMを管理すると承認と押印機能が欲しくなります。
- 製番構成
- 基準構成では味わえないリッチな構成。受注生産型の旅人に必須のアイテム。
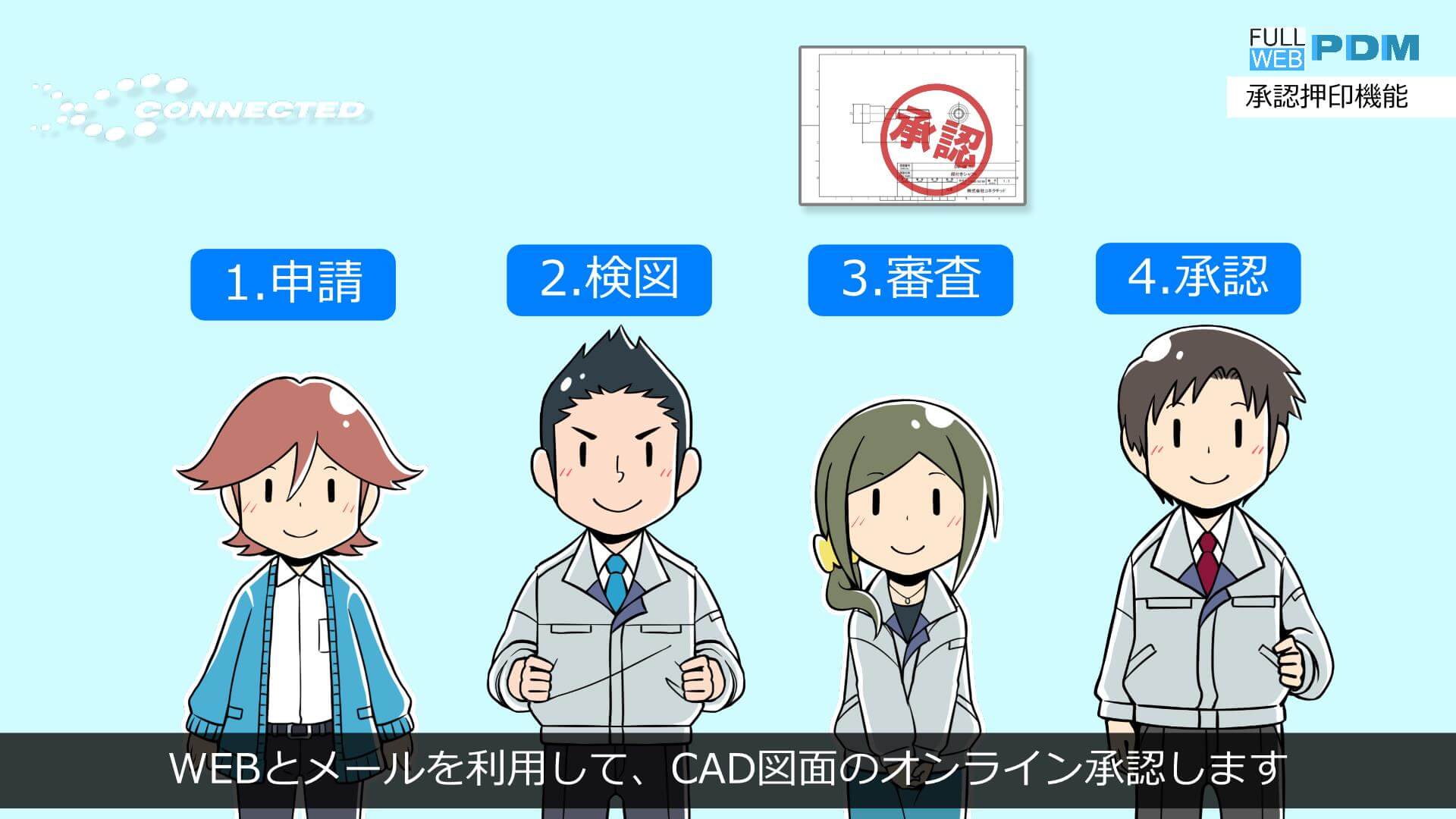
承認押印機能

製番構成機能
便利大陸
便利大陸
- BOMセル直接入力
- ツリー見ながら属性変更できるなんて、素敵ですね。間違いがなくなる
- BOM文字列検索
- このツリーにあるはずなんだけどが見つかる。
- ダブルクリックで図面を開く
- 構成のこの図面みたい、はいダブルクリックで、CADが開きます。
- EXCEL部品表からのコピー
- あれ、EXCELで部品表届いたんだけど、どうする??EXCELからカット&ペースト。
- BOM関連ファイルの添付
- BOMのアイテムには、なんでも添付できる。しかも添付もサムネイル表示されてる。
- BOM階層指定 順展開
- ひとつのBOM内で何階層でも展開。もうひとつBOM開いたりしません、私は。
- BOM階層指定 逆展開
- ええと、退屈なので、見なくてもいいかも。
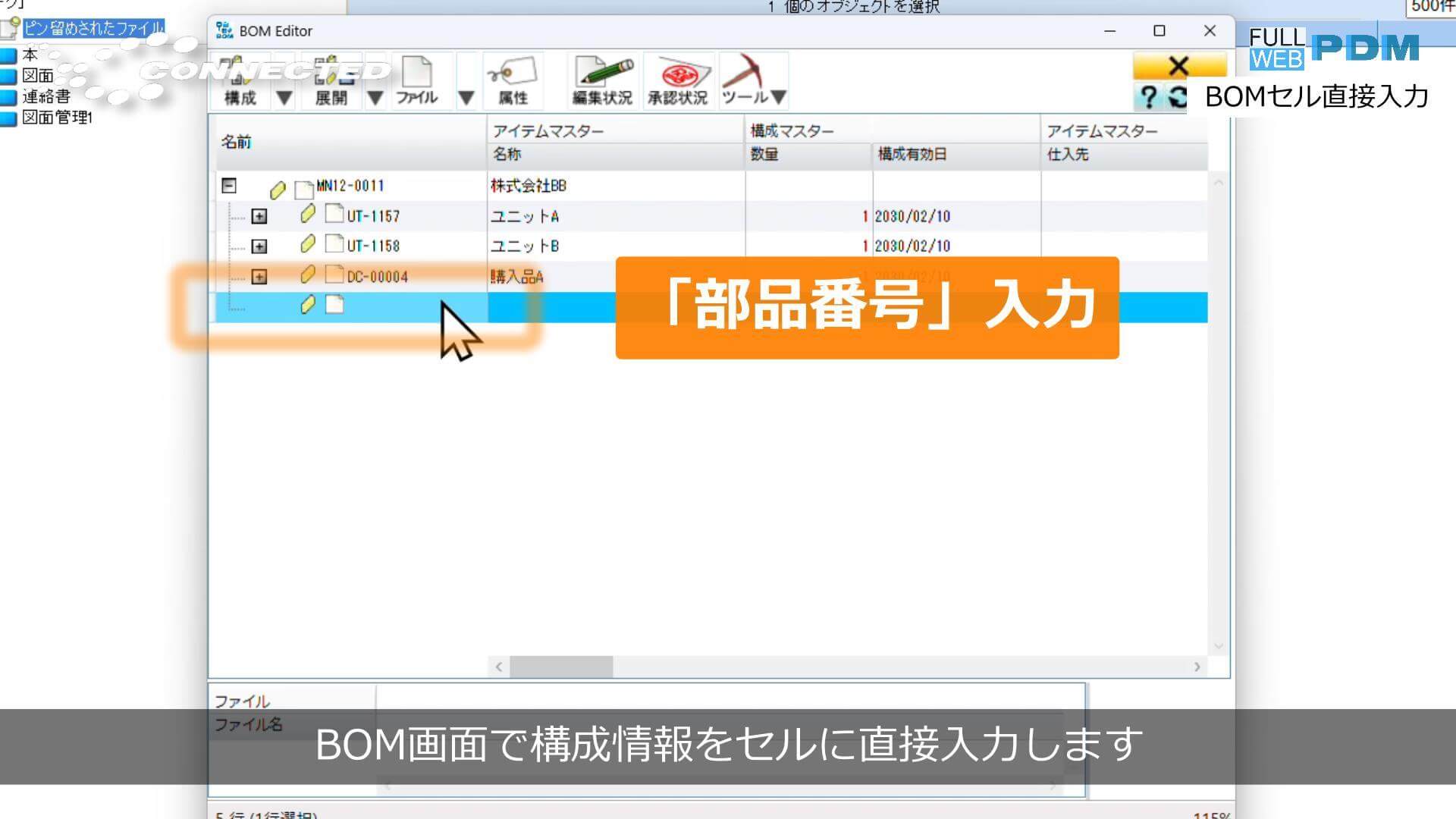
BOMセル直接入力
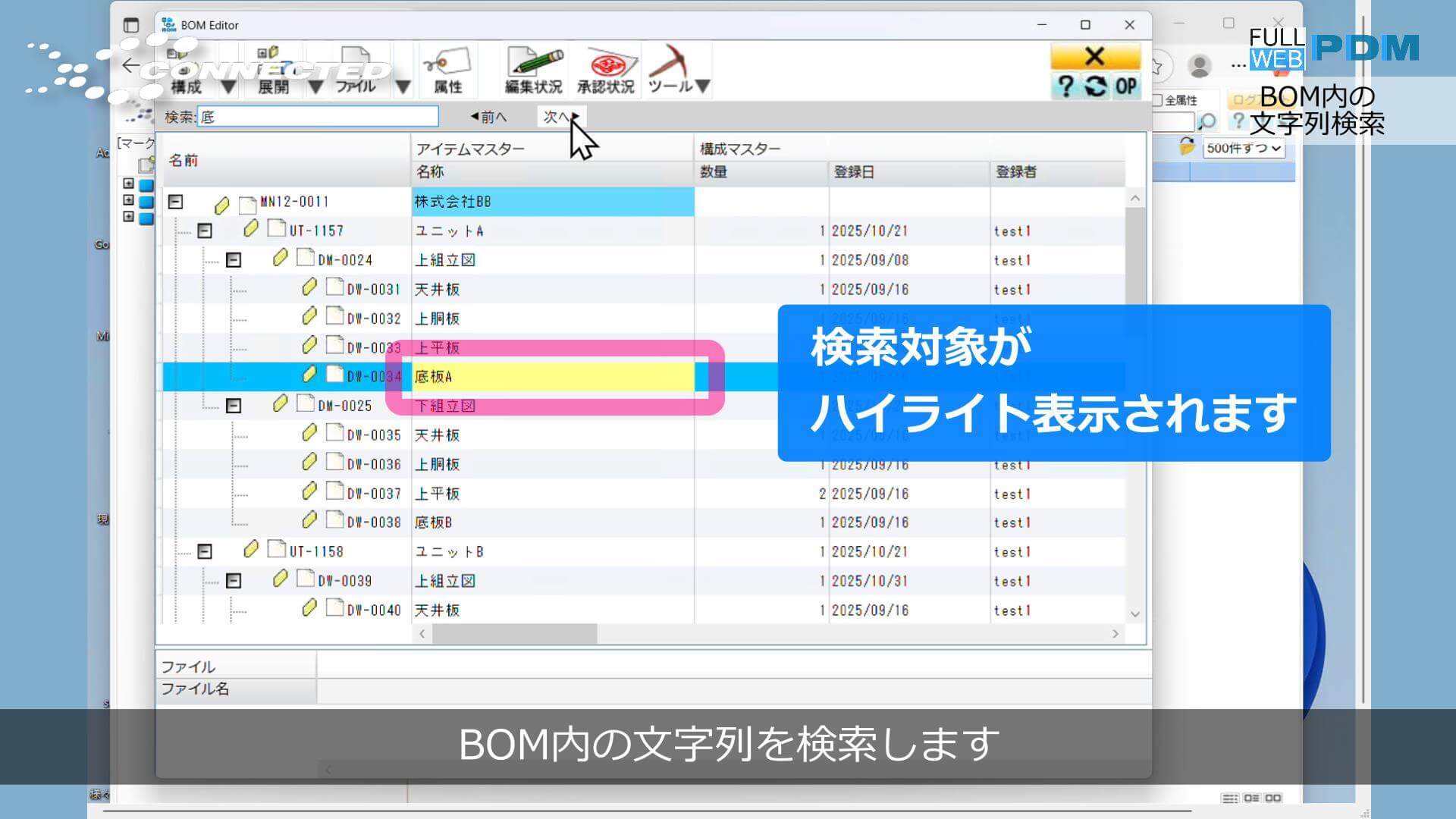
BOM内文字列検索
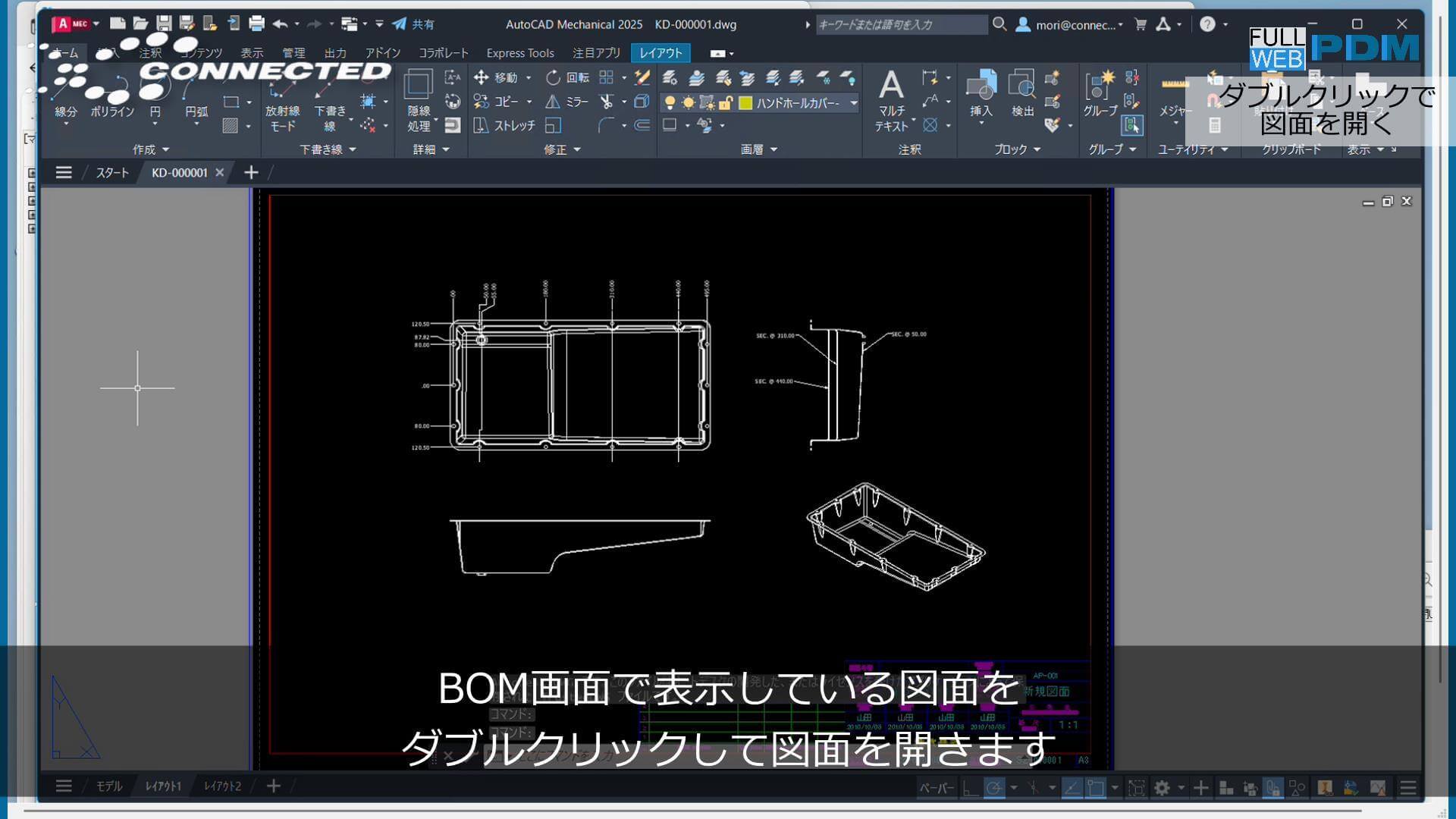
ダブルクリックで図面を開く
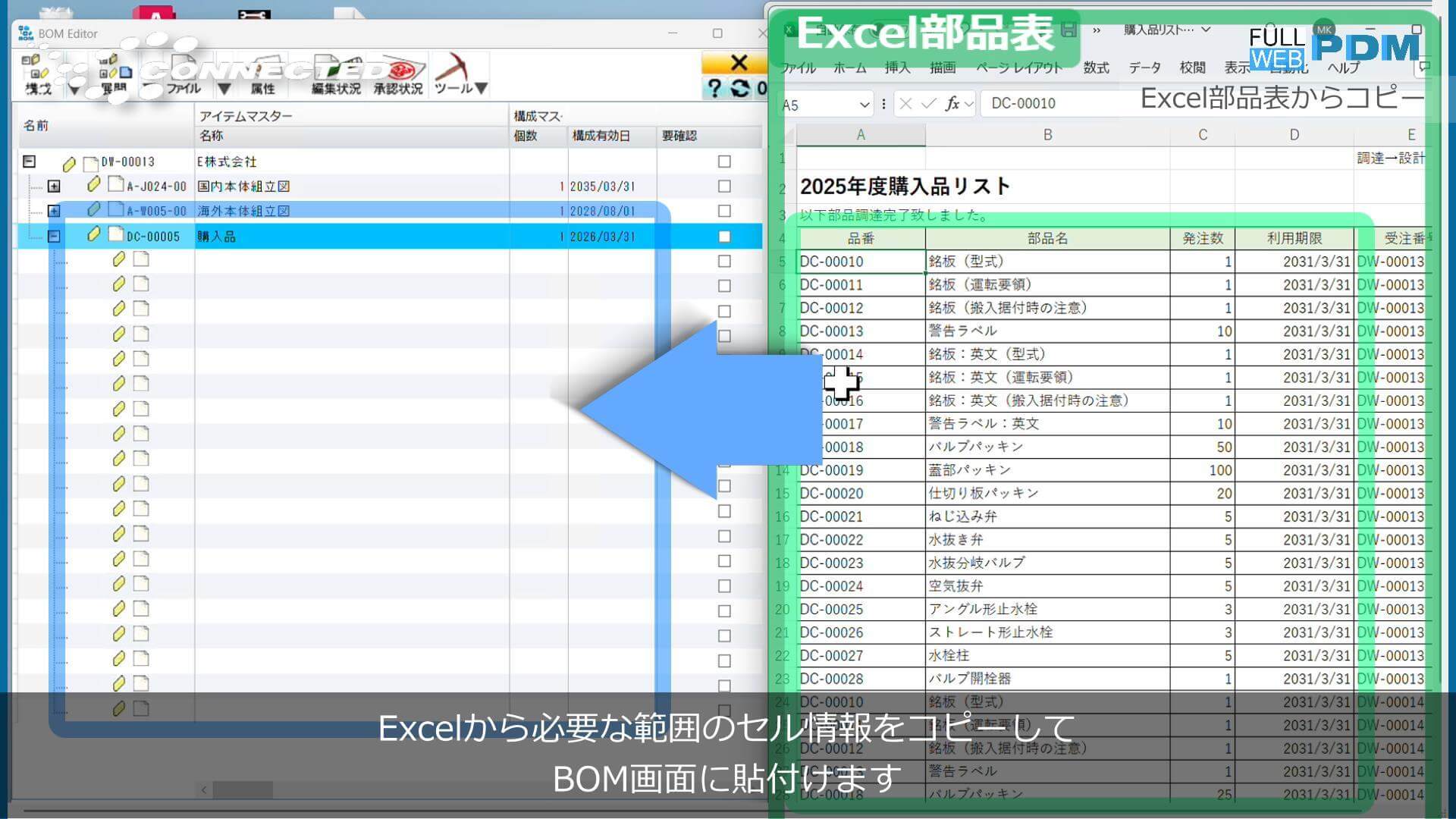
Excel部品表からのコピー
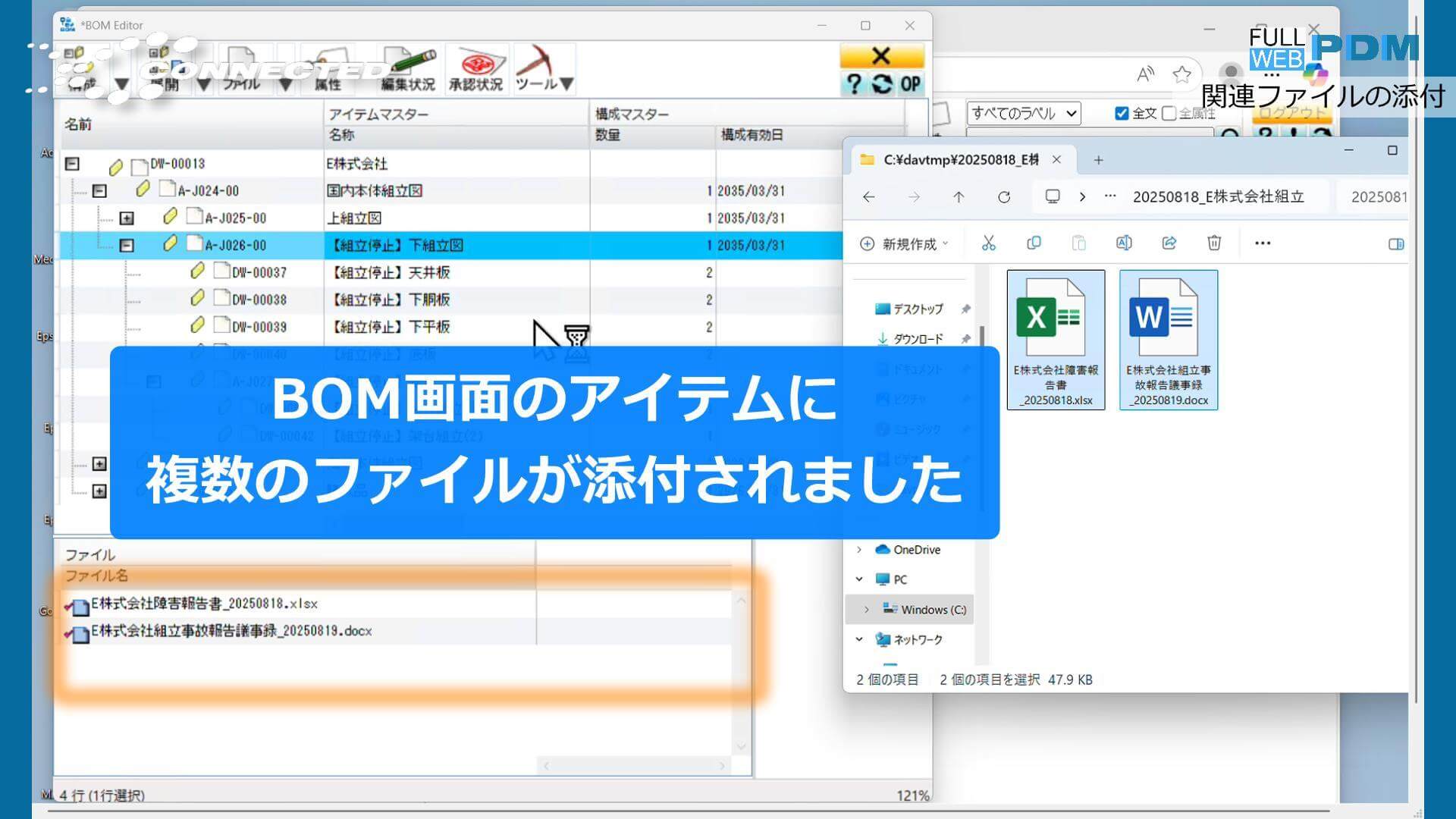
BOM関連ファイルの添付
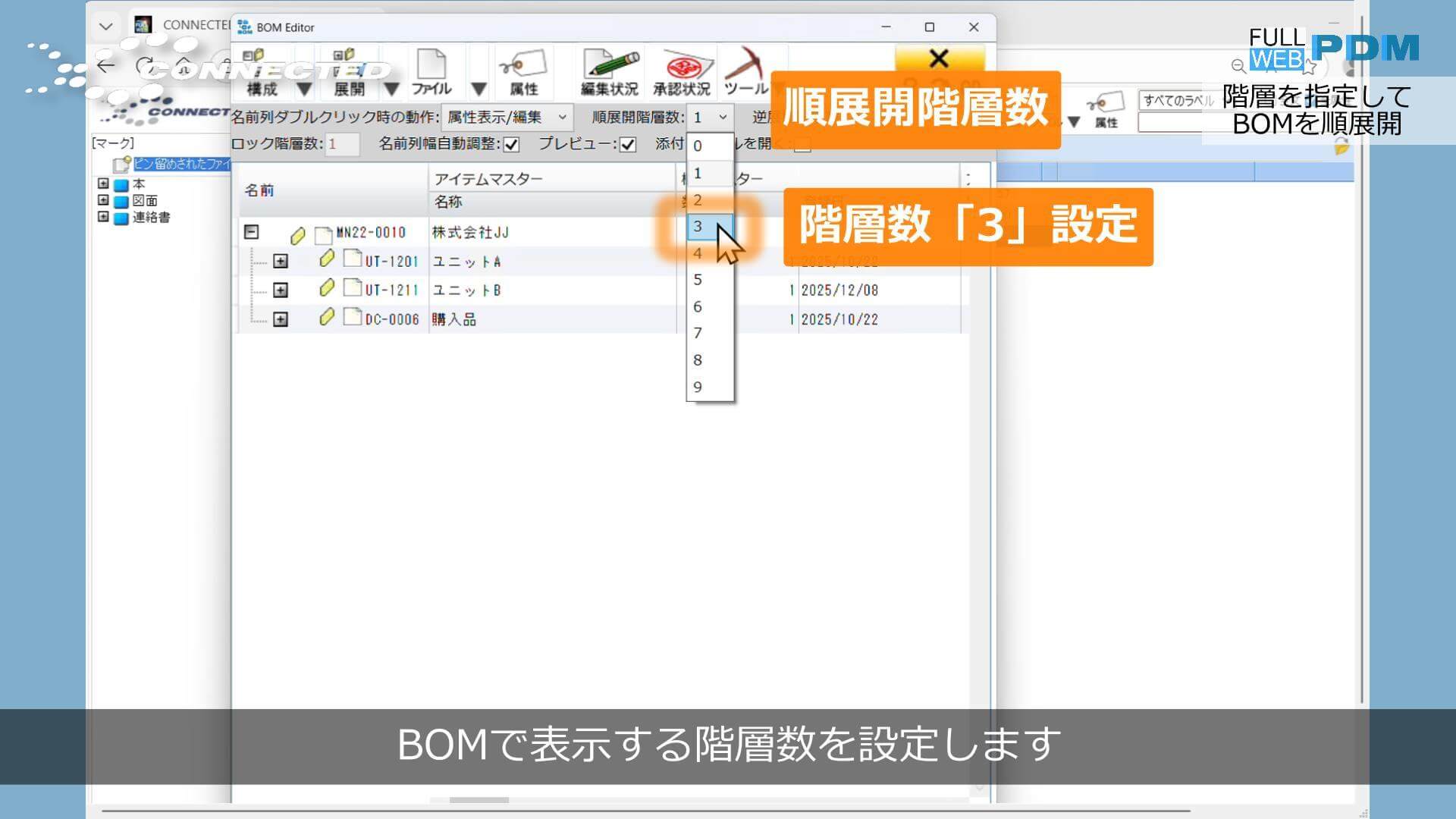
BOM 階層指定|順展開
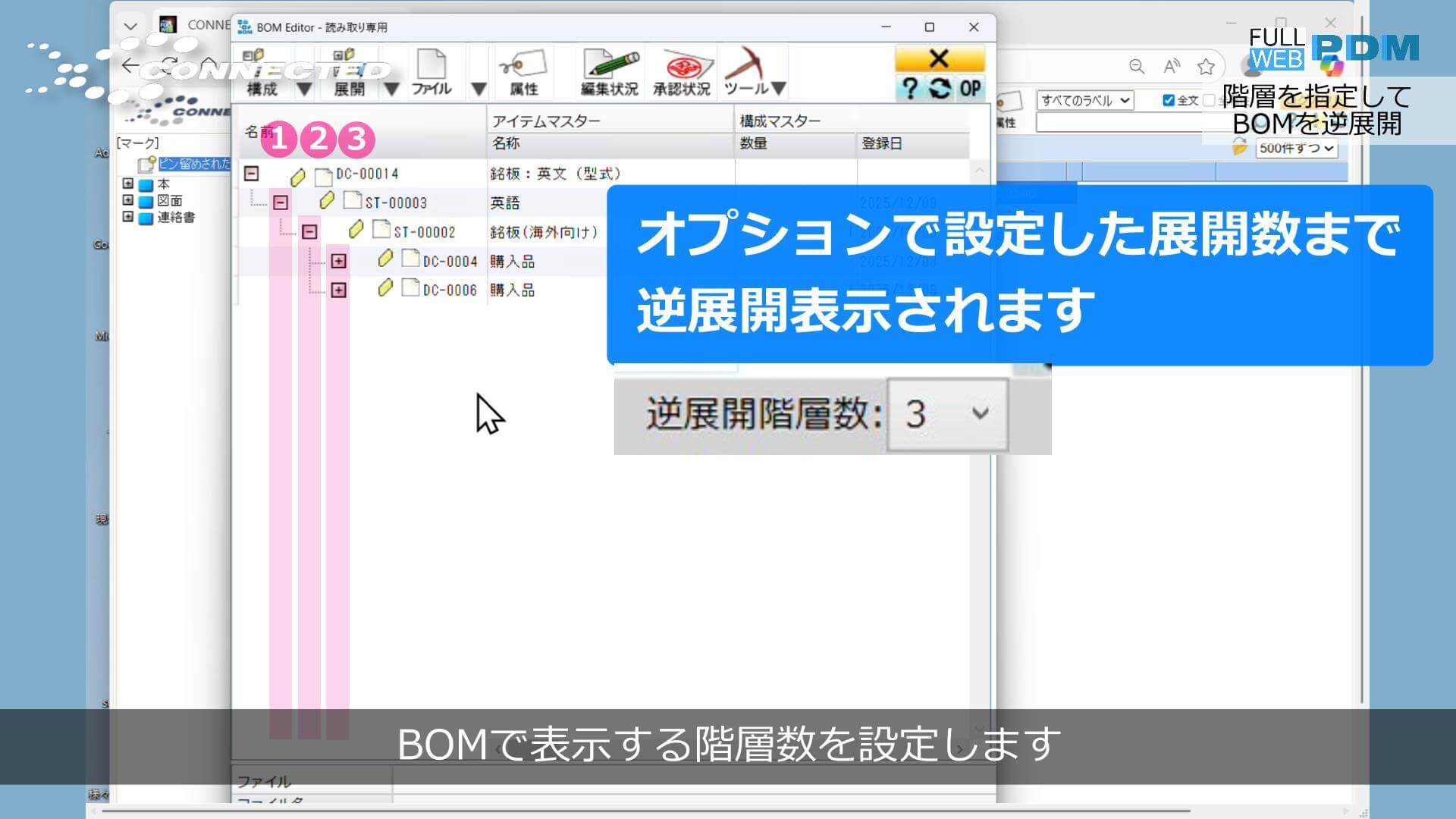
BOM 階層指定|逆展開
大地で闘う戦士編

CONNECTED Programmer Talking 001 デベロッパー_井上充司

CONNECTED Programmer Talking 002 デベロッパー_木村孝司

CONNECTED Programmer Talking 003 デベロッパー_吉岡裕之
CONNECTED×RUN 003-01
靭公園-安治川トンネル_夢洲駅(大阪万博会場)コース

CONNECTED×RUN 003-02
ユニバーサル・スタジオ・ジャパン_夢洲駅(大阪万博会場)コース

CONNECTED×RUN 003-03
淀川・舞洲スラッジセンター経由_夢洲駅(大阪万博会場)コース
CONNECTED×RUN 003-04
夢舞大橋-夢洲駅-FINISH_夢洲駅(大阪万博会場)コース

CONNECTED×RUN 002.5
大阪城内堀WALK

CONNECTED×RUN 002
大阪城周遊コース

CONNECTED×RUN 001
大阪・神崎川練習コース

お問い合せ
お問い合せフォームより必要情報をご入力の上、送信して頂きますと、コネクテッド担当よりご連絡いたします。